單TDA4行泊一體,打開智能駕駛的新篇章
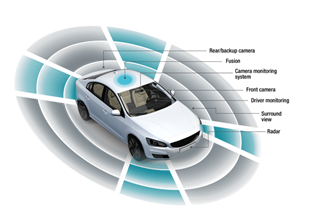
在汽車智能化、電動化、網聯化的進程中,眾多智能駕駛領域的企業扎根成長,將智能駕駛技術引入現實生活中。我們看到更多的汽車配備了強大的 ADAS 功能,在以場景為核心的自動駕駛技術向無人駕駛階段過渡的過程中,更高級的自動駕駛解決方案也日趨成熟。像自動泊車(APA)、家庭區域記憶泊車(HAVP)、交通擁堵輔助(TJA)、高速輔助駕駛(HWA)、自動輔助導航駕駛(NOA)等功能已為普通車主耳熟能詳,不再是專業人士的紙上談兵。

當前,整車的電子電氣架構由分布式向集中式演進的過程中,泊車功能和行車功能融合,出現了越來越多的行泊一體技術方案即智能駕駛域控制器方案。多芯片的行泊一體化方案在已經得到了廣泛應用。行車和泊車從兩套單獨的系統整合為一套,對于系統的功能和性能來說,提升性能的同時,給消費者帶來了多個不同場景之間無縫銜接的智能駕駛體驗。基于雙TDA4VM行泊一體化方案的量產,給用戶帶來非凡體驗的同時,我們也看到了智能駕駛技術的提升和巨大的想象空間。
?基于雙TDA4VM行泊一體方案已經量產。同時,伴隨著算法軟件成熟度的提高、更高性能芯片的出現,以及系統成本優勢,使得單芯片TDA4行泊一體化的方案成為行泊一體化方案的理想選擇。從當前的形態來看, 有兩種方式實現:一種是,基于單TDA4VM或TDA4VM Eco實現AI算力8TOPS左右的單TDA4VM/VMeco行泊一體化解決方案,這種方案使用分時復用的方式實現行泊一體化解決方案,傳感器系統可配置為5V5R或6V5R;另外一種是,基于單TDA4VH或TDA4VM Plus實現AI算力24~32TOPS的單TDA4VH/VM Plus行泊一體化解決方案,算力更強,可接入更多的攝像頭。
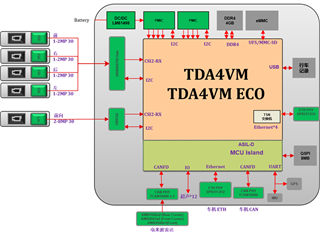
?單TDA4VM/TDA4VM Eco行泊一體化方案如下圖所示,它需要從不同的傳感器中提取數據,并將其轉換為車輛的行駛情報。這些傳感器需要配備不同類型的攝像頭、毫米波雷達和超聲波傳感器等,該方案展示的是5V5R的方案,即5個攝像頭和5個毫米波雷達,根據用戶的需要傳感器的數量和類型可以調整。
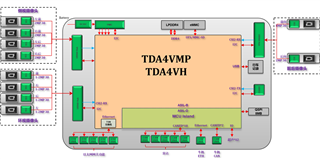
單TDA4VH/TDA4VM PLUS行泊一體化方案如下圖所示,它具有更高的算力(單芯片可以達24-32TOPS),可以接入更多的攝像頭。比如下面的10V5R的方案,使用10個攝像頭和5個毫米波雷達實現了行泊一體的方案。根據用戶的需要傳感器的數量和類型可以調整。
- 功能方面:單芯片可實現豐富的行車和泊車的功能
- 行車:可實現盲區檢測(BSD)、開門預警(DOW)、車道偏離預警(LDW)、前向碰撞預警(FCW)、智能遠光燈控制(IHC)、前方穿行預警(FCTA)、后方穿行預警(RCTA)、后方碰撞預警(RCW)、自適應巡航(ACC)、車道保持輔助(LKA)、手動變道(PLC)、交通擁堵輔助(TJA)、高速輔助駕駛(HWA)、自動緊急制動(AEB)、交互式速公路自動駕駛(HWP)、交互式高速公路擁堵自動駕駛(TJP)、自動輔助導航駕駛(NOA)等功能;
- 泊車方面,可實現全景功能(AVM)、自動泊車輔助(APA)、遙控泊車輔助(RPA)、家庭區域記憶泊車(HAVP)等功能;
- 安全方面:TI Jacinto7處理器集成HSM實現信息保密,同時內部集成了ASIL D的MCU。從而使用戶的產品能夠滿足汽車的質量和功能安全以及信息安全目標。
- 可擴展性:高性能片上系統 (SoC)的重要性在于它可以進行并行處理,TI Jacinto7處理器屬于異構多核的架構,除了ARM A72、數字信號處理C7x/C66、MCU R5F等計算核,內部VPAC、DMPAC等加速器有效降低了主核的負載,從而使得應用可以靈活部署,推動持續的功能定制、擴展。
- 算力方面:Jacinto7為用戶提供了單芯片0~32T的算力,單個C7x/MMA可以實現8TOPS算力,系列根據配置分為不同版本,可以滿足降本和功能擴展需求。
- 成本方面:TDA4系列以先進的集成度,有效地節約了系統成本。TDA4系列處理器集成了ASIL-D MCU核心,不再需要外部MCU;接口豐富,SOC集成了多路CAN-FD接口和以太網、PCIe交換機等;內置ISP,攝像頭無需外置ISP。
系統的開發必須具有較高性價比,才能實現廣泛而有效的使用。隨著算法軟件的成熟,基于多片TDA4VM行泊一體化方案已經量產,它具有高開放度、高靈活度,行泊一體、有效平衡了算力、成本和功耗。豐富的行車、泊車功能及高安全的系統,為用戶提供安全舒適的沉浸式駕乘體驗。
在未來,基于單顆TDA4VM Eco/TDA4VM PLUS/TDA4VH的行泊一體化方案可以從簡單的場景(更少的傳感器、更低的分辨率)擴展到更復雜的場景,打開了智能駕駛新篇章并有助于降低系統的成本,從而實現ADAS技術的大眾化和普及化。